Механическая система из грузов, ступенчатого шкива
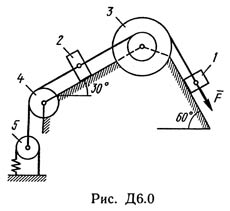
0600mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
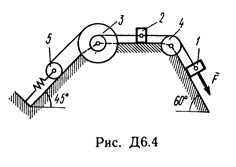
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
 вариант 00
вариант 00 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
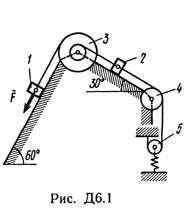
0601mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 01 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
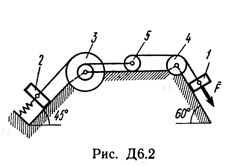
0602mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 02 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
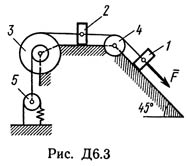
0603mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 03 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0604mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 04 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0605mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 05 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0606mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 06 m
1=0кг
m
2=4кг
m
3=5кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
ω
3 — ?
0607mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 07 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0608mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 08 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0609mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 09 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0610mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
 вариант 10
вариант 10 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0611mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 11 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0612mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 12 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0613mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 13 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0614mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 14 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0615mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 15 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0616mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 16 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0617mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 17 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0618mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 18 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0619mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 19 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0620mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
 вариант 20
вариант 20 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0621mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 21 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0622mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 22 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0623mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 23 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0624mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 24 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0625mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 25 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0626mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 26 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0627mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 27 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0628mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 28 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0629mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 29 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0630mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
 вариант 30
вариант 30 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0631mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 31 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0632mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 32 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0633mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 33 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0634mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 34 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0635mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 35 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0636mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 36 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0637mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 37 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0638mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 38 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0639mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 39 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0640mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
 вариант 40
вариант 40 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0641mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 41 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0642mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 42 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0643mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 43 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0644mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 44 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0645mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 45 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0646mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 46 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0647mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 47 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0648mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 48 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0649mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 49 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0650mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
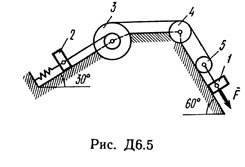 вариант 50
вариант 50 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0651mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 51 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0652mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 52 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0653mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 53 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0654mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 54 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0655mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 55 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0656mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 56 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0657mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 57 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0658mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 58 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0659mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 59 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0660mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
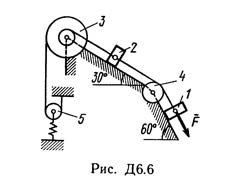 вариант 60
вариант 60 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0661mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 61 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0662mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 62 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0663mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 63 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0664mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 64 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0665mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 65 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0666mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 66 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0667mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 67 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0668mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 68 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0669mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 69 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0670mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
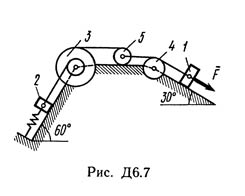 вариант 70
вариант 70 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0671mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 71 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0672mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 72 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0673mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 73 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0674mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 74 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0675mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 75 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0676mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 76 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0677mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 77 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0678mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 78 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0679mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 79 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0680mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
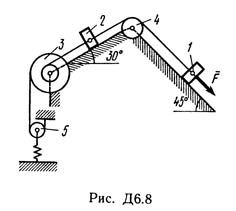 вариант 80
вариант 80 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0681mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 81 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0682mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 82 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0683mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 83 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0684mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 84 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0685mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 85 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0686mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 86 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0687mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 87 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0688mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 88 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0689mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 89 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?
0690mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
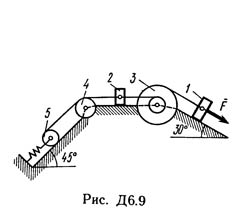 вариант 90
вариант 90 m
1=0кг
m
2=6кг
m
3=4кг
m
4=0кг
m
5=5кг
c=200Н/м
М=1,2Н∙м
F=80(4+5s)
ω
3 — ?
0691mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 91 m
1=8кг
m
2=0кг
m
3=0кг
m
4=4кг
m
5=6кг
c=320Н/м
М=0,8Н∙м
F=50(8+3s)
v
1 — ?
0692mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 92 m
1=0кг
m
2=4кг
m
3=6кг
m
4=0кг
m
5=5кг
c=240Н/м
М=1,4Н∙м
F=60(6+5s)
v
2 — ?
0693mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 93 m
1=0кг
m
2=6кг
m
3=0кг
m
4=5кг
m
5=4кг
c=300Н/м
М=1,8Н∙м
F=80(5+6s)
ω
4 — ?
0694mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 94 m
1=5кг
m
2=0кг
m
3=4кг
m
4=0кг
m
5=6кг
c=240Н/м
М=1,2Н∙м
F=40(9+4s)
v
1 — ?
0695mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 95 m
1=0кг
m
2=5кг
m
3=0кг
m
4=6кг
m
5=4кг
c=200Н/м
М=1,6Н∙м
F=50(7+8s)
v
c5 — ?
0696mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 96 m
1=8кг
m
2=0кг
m
3=5кг
m
4=0кг
m
5=6кг
c=280Н/м
М=0,8Н∙м
F=40(8+9s)
ω
3 — ?
0697mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 97 m
1=0кг
m
2=4кг
m
3=0кг
m
4=6кг
m
5=5кг
c=300Н/м
М=1,5Н∙м
F=60(8+5s)
v
2 — ?
0698mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 98 m
1=4кг
m
2=0кг
m
3=0кг
m
4=5кг
m
5=6кг
c=320Н/м
М=1,4Н∙м
F=50(9+2s)
ω
4 — ?
0699mМеханическая система состоит из грузов 1 и 2, ступенчатого шкива 3 с радиусами ступеней R
3 = 0,3 м, r
3 = 0,1 м и радиусом инерции относительно оси вращения ρ
3 = 0,2 м, блока 4 радиуса R
4 = 0,2 м И катка (или подвижного блока) 5 (рис. Д6.0 — Д6.9, табл. Д6); тело 5 считать сплошным однородным цилиндром, а массу блока 4 — равномерно распределенной по ободу. Коэффициент трения грузов о плоскость f = 0,1. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и каток); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости с.
Под действием силы F = f(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент M сил сопротивления (от трения в подшипниках).
Определить значение искомой величины в тот момент времени. Когда перемещение s станет равным s
1 = 0,2 м. Искомая величина указана в столбце "Найти" таблицы, где обозначено: v
1, v
2, v
C3 — скорости грузов 1, 2 и центра масс тела 5, соответственно ω
3 и ω
4 — угловые скорости тел 3 и 4.
Все катки, включая к катки, обмотанные нитями (как, например, каток 5 на рис. 2), катятся по плоскостям без скольжения.
На всех рисунках не изображать груз 2, если m
2 = 0; остальные тела должны изображаться и тогда, когда их масса равна нулю.
вариант 99 m
1=0кг
m
2=5кг
m
3=6кг
m
4=0кг
m
5=4кг
c=280Н/м
М=1,6Н∙м
F=80(6+7s)
v
c5 — ?