Механизм состоит из ступенчатых колес
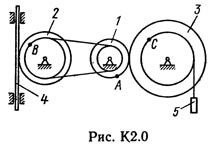
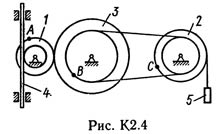
0300mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 00s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
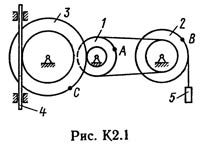
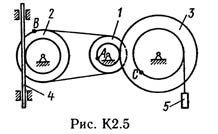
0301mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 01s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
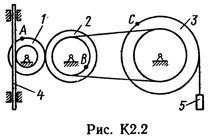
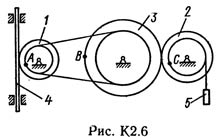
0302mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 02φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
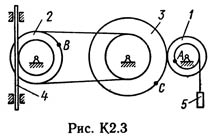
0303mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 03ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0304mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 04φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0305mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 05ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0306mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 06s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0307mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 07v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0308mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 08s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0309mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 09ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0310mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 10s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
0311mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 11s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0312mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 12φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0313mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 13ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0314mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 14φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0315mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 15ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0316mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 16s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0317mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 17v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0318mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 18s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0319mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 19ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0320mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 20s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
0321mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 21s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0322mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 22φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0323mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 23ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0324mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 24φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0325mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 25ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0326mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 26s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0327mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 27v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0328mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 28s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0329mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 29ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0330mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 30s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
0331mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 31s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0332mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 32φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0333mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 33ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0334mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 34φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0335mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 35ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0336mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 36s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0337mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 37v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0338mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 38s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0339mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 39ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0340mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 40s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
0341mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 41s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0342mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 42φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0343mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 43ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0344mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 44φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0345mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 45ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0346mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 46s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0347mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 47v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0348mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 48s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0349mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 49ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0350mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 50s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
0351mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 51s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0352mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 52φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0353mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 53ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0354mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 54φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0355mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 55ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0356mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 56s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0357mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 57v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0358mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 58s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0359mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 59ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0360mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 60s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
0361mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 61s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0362mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 62φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0363mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 63ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0364mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 64φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0365mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 65ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0366mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 66s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0367mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 67v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0368mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 68s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0369mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 69ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0370mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 70s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
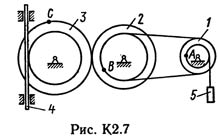
0371mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 71s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0372mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 72φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0373mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 73ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0374mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 74φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0375mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 75ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0376mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 76s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0377mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 77v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0378mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 78s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0379mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 79ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0380mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 80s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
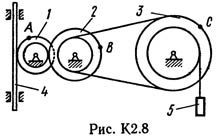
0381mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 81s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0382mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 82φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0383mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 83ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0384mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 84φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0385mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 85ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0386mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 86s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0387mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 87v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0388mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 88s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0389mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 89ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?
0390mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 90s
4=4(7t–t
2)
v
B, v
C — ?
ε
2, a
A, a
5 — ?
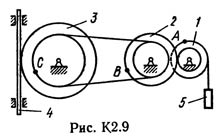
0391mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 91s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0392mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 92φ
1=2t
2–9
v
4, ω
2 — ?
ε
2, a
С, a
5 — ?
0393mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 93ω
2=7t–3t
2v
5, ω
3 — ?
ε
2, a
A, a
4 — ?
0394mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 94φ
3=3t–t
2v
4, ω
1 — ?
ε
1, a
B, a
5 — ?
0395mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 95ω
1=5t–2t
2v
5, v
B — ?
ε
2, a
C, a
4 — ?
0396mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 96s
4=2(t
2–3)
v
A, v
C — ?
ε
3, a
B, a
4 — ?
0397mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 97v
4=3t
2–8
v
A, ω
3 — ?
ε
3, a
B, a
5 — ?
0398mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 98s
5=2t
2–5t
v
4, ω
2 — ?
ε
1, a
C, a
4 — ?
0399mМеханизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной. на одно из колес (рис. К2.0 — К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 — r
1 = 2 см, R
1 = 4 см, у колеса 2 — r
2 = 6 см, R
2 = 8 см, у колеса 3 — r
3 = 12 см, R
3 = 16 см. На ободьях колес расположены точки А, В и С.
В столбце "Дано" таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ
1(t) — закон вращения колеса 1, — закон движения рейки 4, — закон изменения угловой скорости колеса 2, v
5(t) — закон изменения скорости груза 5 и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω против хода часовой стрелки, для s
4, s
5 и v
4, v
5 — вниз.
Определить в момент времени t
1 = 2 с указанные в таблице в столбцах "Найти" скорости (v — линейные, ω — угловые) и ускорения (а — линейные, ε — угловые) соответствующих точек или тел (v
5 — скорость груза 5 и т. д.).
вариант 99ω
3=8t–3t
2v
5, v
B — ?
ε
2, a
A, a
4 — ?